
Lokumbau Re 460 von Märklin

Hier das bereits geöffnete Modell, das mit einem LokPilot v4.0 ausgerüstet wird.
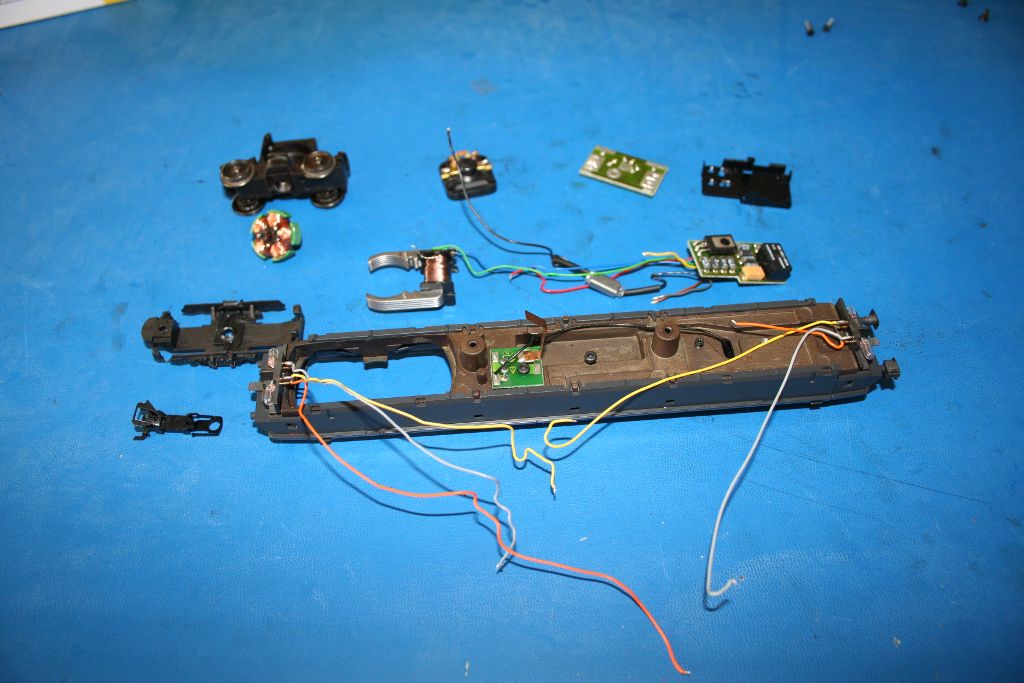
Sämtliche Innereien sind entfernt: Motordrehgestell, darunter der Anker, Motorschild, Lichtplatine mit Halternung, Radblende, darunter die Kupplung, der Stator mit Feldspule ist mit der Entstördrossel mit dem elektronischen Fahrtrichtungswechsler verbunden.
Zu beachten: Der fünfpolige Anker ist ein 5* Hochleistungmotor (FDCM, 610030), wie er von Märklin Ende 80er, Anfang 90er in einigen Modellen verbaut wurde. In diesem Modell wurde er nachträglich eingebaut. Original hatte die Lok einen dreipoligen Anker.
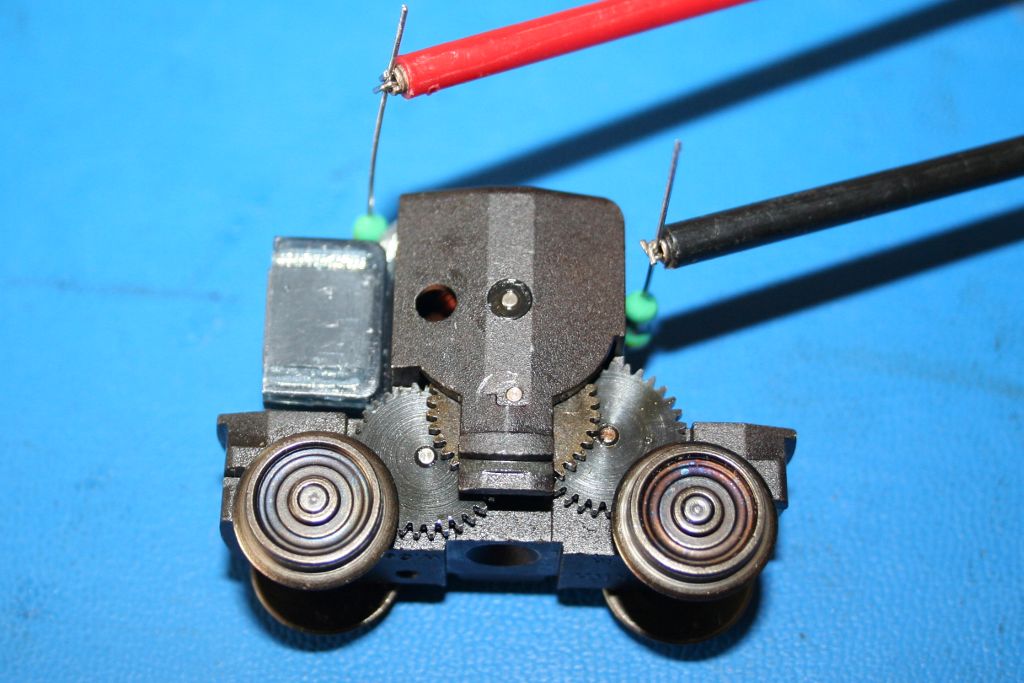
Der Motorblock ist bereits mit dem Permanentmagneten wieder zusammengebaut und wird an einer Gleichspannungsquelle getestet.
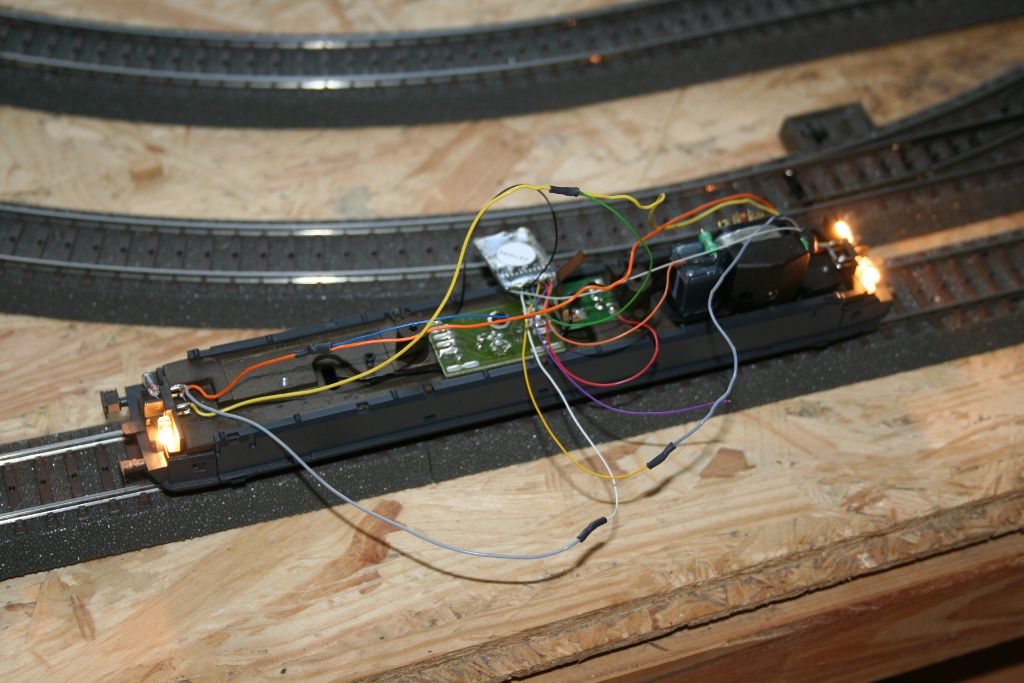
Nach dem provisorischen Decodereinbau der erste Test auf dem Programmiergleis. Alles arbeitet grundsätzlich wie gewünscht. Grundsätzlich. Jedoch hat die mitgelieferte Firmware des LokPilot v4.0 noch erhabliche Mühe den nachträglich eingebauten 5* Hochleistungsmotor ruckelfrei anzusteuern. Nach einem Firmwareupdate mit einem LokProgrammer waren die Probleme weitestgehend verschwunden.
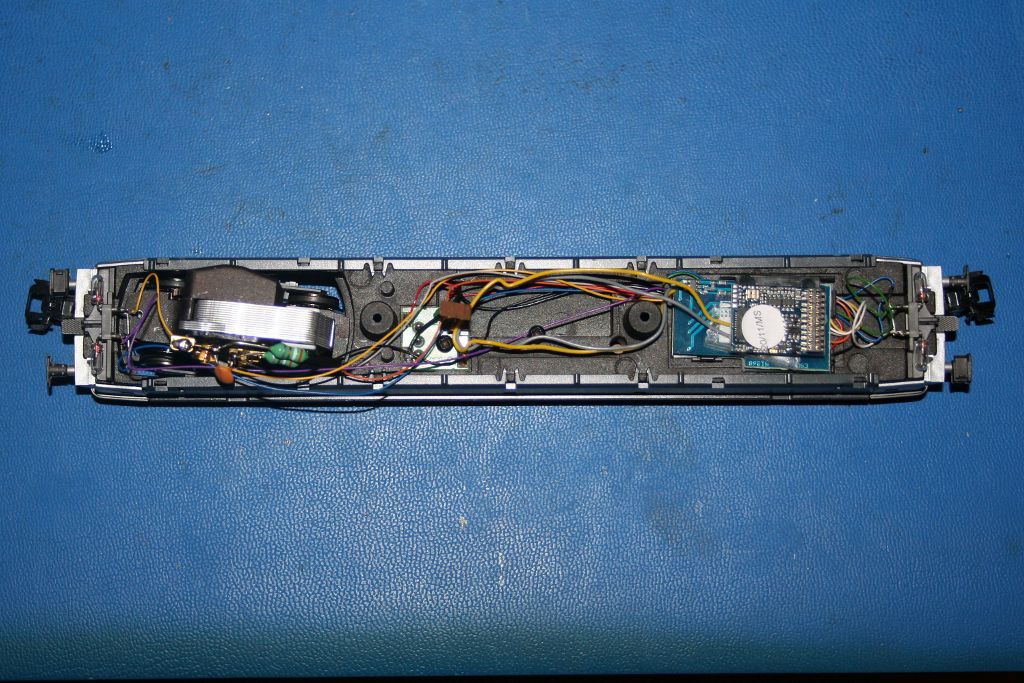
Vor allem nach längerem Betrieb und unter starker Last, aber auch beim Anhalten zeigten sich nach wie vor manchmal Rucker. Teilweise blieb die Lok bis zu 20cm später stehen als vorgesehen. Ich habe mich deshalb dafür entschieden den alten 5*-Hochleistungsmotor durch einen neuen HLA zu ersetzten. Dabei habe ich auch gleich den Decoder durch einen mit einer 21-poligen Schnittstelle ersetzt. Das Resultat lässt sich sehen: Die Innereien der Lok sehen besser aus und auch fährt die Lok nun absolut Ruckelfrei, auch unter Last.

Fazit: Bereits nach einem Decoder-Firmware-Update des ersten Decoders war die Lokomotive zu einer Bereicherung einer digial gesteuerten Anlage geworden. Der Einbau des HLA hat das Spielvergnügen dieser Lok noch ein klein wenig gesteigert. Damit konnte ich auch eine Doppeltraktion mit einer zweiten Re 460 zusammenstellen.